Prototyp
Inverzna kinematika prednej nohy
Inverzna kinematika zadnej nohy
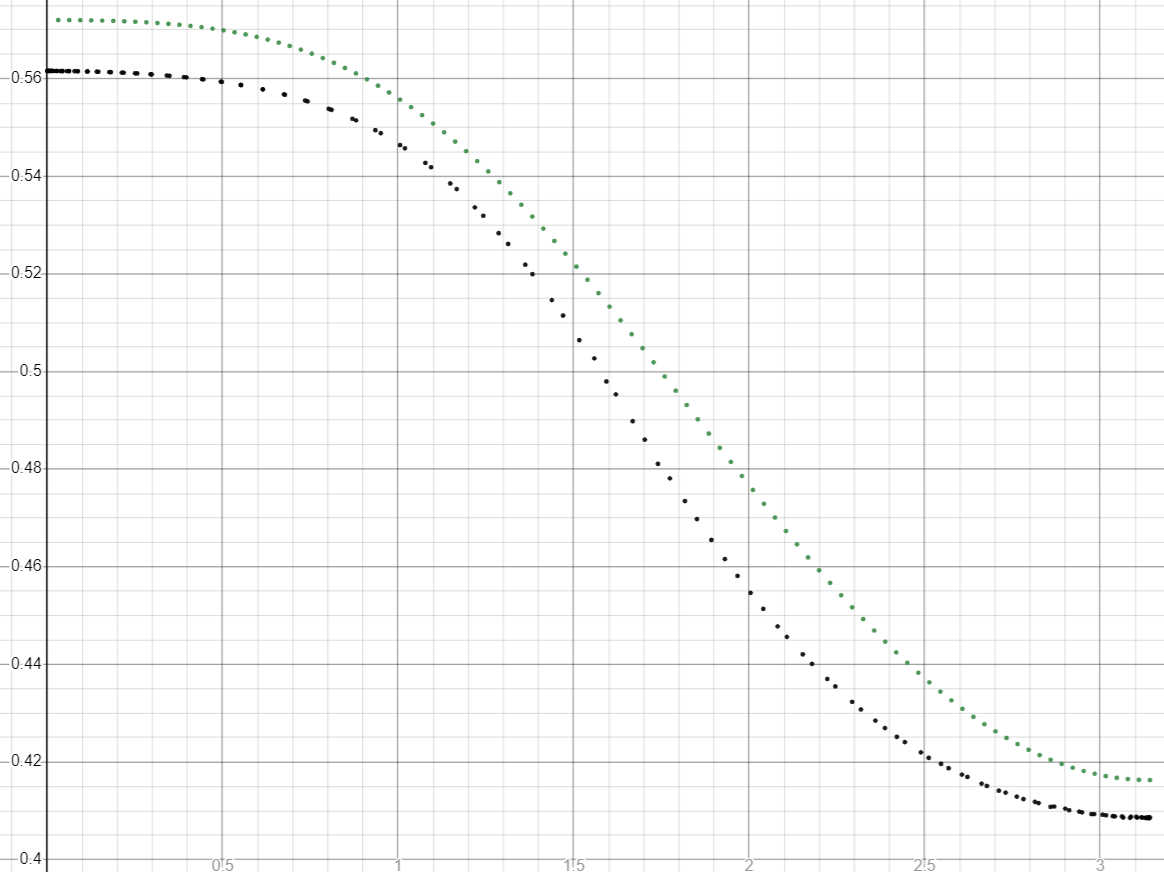
Porovnanie uhol motorB k vzdialenosti konca nohy pre prednu nohu. Cierna predstavuje data zo simulatora Gazebo, zelene z analytickej kinematiky.
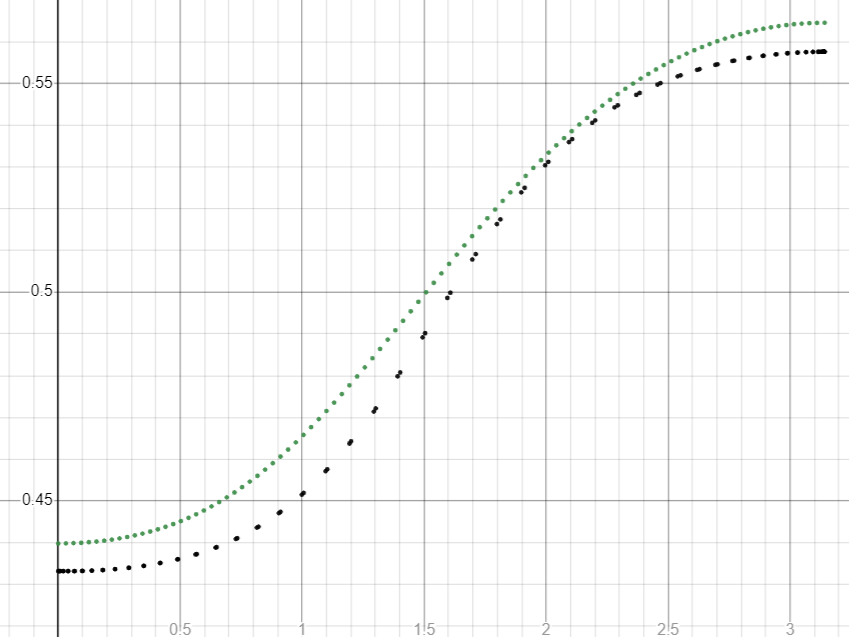
Porovnanie uhol motorB k vzdialenosti konca nohy pre zadnu nohu. Cierna predstavuje data zo simulatora Gazebo, zelene z analytickej kinematiky.