Aktívna percepcia v robotickom videní
Diplomová práca Patrika Modrovského
Popis
Naučit robota rozoznávať predmety a následne s nimi manipulovať je pomerne často skúmaná téma. Avšak vo väčšine prípadov má robot len statický pohľad na svet. V mojej diplomovej práci skúmam takéto učenie využitím dynamickej kamery, ktorou je možné pohybovať podobne ako manipulačním ramenom.Ciele
1. Štúdium literatúry v oblasti aktívnej percepcie.2. Návrh modelu neurónovej siete aktívnej percepcie pre robota NICA.
3. Vyhodnotenie funkčnosti a úspešnosti modelu a návrh možných vylepšení
Kalendár
Štúdium článku Active Perception and Representation for Robotic Manipulation 1. Marec, 2023
Štúdium článku Connecting the CoppeliaSim robotics simulator to virtual reality 15. Marec, 2023
Zoznámenie sa s Coppelia simulátorom 22. Marec, 2023
Forward kinematika robota v Coppelia 18. April, 2023
Tvorba stránky a príprava prvých stránok PDF diplomovky 25. Apríl, 2023
Dokončenie stránky 1. Máj, 2023
Príprava frameworku 8. Máj, 2023
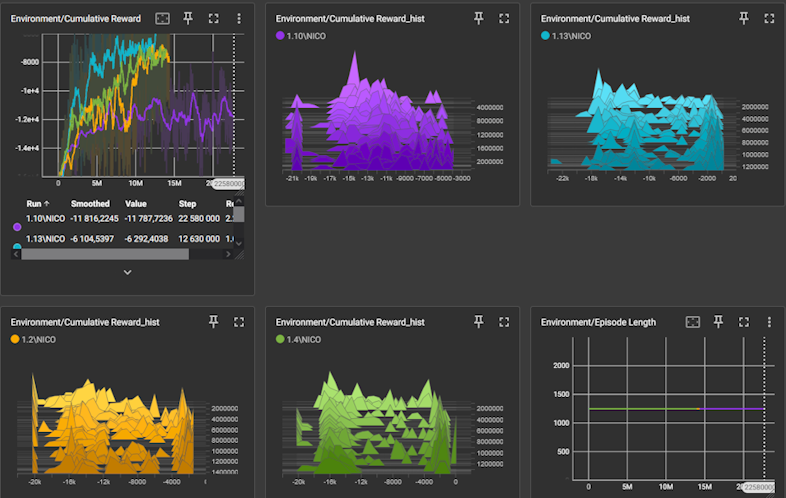
Trénovanie robota NICO 25. Október, 2023 - 29. November, 2023
Písanie prvej kapitoly + úpravy stránky 29. November, 2023 - 7. November, 2023
Videá
Obrázky